คอมพิวเตอร์ได้สร้างขั้นมาเพื่อใช้ในการแก้ปัญหาในเชิงตัวเลขโดยมีภาษาทางคอมพิวเตอร์หลายตัวที่ช่วยในการแก้ปัญหา เช่น ภาษา C, Fortran , Pascal เป็นต้น การใช้โปรแกรมภาษา C, Fortran และ Pascal ในการแก้ปัญหาเชิงตัวเลข และกราฟิกที่มีความซับซ้อนค่อนข้างจะยุ่งยากและเสียเวลามาก เพราะต้องใช้คำสั่งเป็นจำนวนมาก และมีรูปแบบคำสั่งที่แน่นอน บริษัท MathWorks Inc, จึงได้พัฒนาโปรแกรมที่มีชื่อว่า MATLAB เพื่อใช้ในการคำนวณเชิงตัวเลข และกราฟิกที่ซับซ้อนให้ง่ายต่อการใช้งาน มีความรวดเร็ว และการเขียนโปรแกรมไม่ยุ่งยาก เนื่องจากโปรแกรม MATLAB เป็นโปรแกรมที่มีการพัฒนาอย่างไม่หยุดยั้ง และเป็นโปรแกรมที่ง่ายต่อความเข้าใจ และเขียนโปรกแกรมไม่ซับซ้อน และเมื่อนำไปใช้งานและสามารถเห็นผลลัพธ์ได้อย่างรวดเร็ว ด้วยเหตุนี้เองจึงทำให้โปรแกรม MATLAB ถูกนำมาใช้งานกันอย่างกว้างขวางในสาขาต่าง ๆ
MATLAB คืออะไร
MATLAB เป็นภาษาคอมพิวเตอร์ชั้นสูง (High-level Language) สำหรับการคำนวณทางเทคนิคที่ประกอบด้วยการคำนวณเชิงตัวเลข กราฟิกที่ซับซ้อน และการจำลองแบบเพื่อให้มองเห็นภาพพจน์ได้ง่ายและชัดเจนชื่อของ MATLAB ย่อมาจาก matrix laboratory เดิมโปรแกรม MATLAB ได้เขียนขึ้นเพื่อใช้ในการคำนวณทาง matrix หรือเป็น matrix software ที่พัฒนาจากโพรเจ็กที่ชื่อ LINKPACK และ EISPACK
MATLAB ได้พัฒนามาด้วยการแก้ปัญหาที่ส่งมาจากหลายๆ ผู้ใช้เป็นระยะเวลาหลายปีจึงทำให้โปรแกรม MATLAB มีฟังก์ชันต่างๆ ให้เลือกใช้มากมาย ในบางมหาวิทยาลัยได้ใช้โปรแกรม MATLAB เป็นหลักสูตรพื้นฐานในการศึกษาทางด้วนคณิตศาสตร์ วิศวกรรม และวิทยาศาสตร์แขนงต่างตลอดจนใจด้วนอุตสาหกรรมได้ใช้โปรแกรม MATLAB เป็นเครื่องมือสำหรับใช้ในงานวิจัย พัฒนาและวิเคราะห์
โปรแกรม MATLAB จะมีกล่องเครื่องมือที่ใช้ในการหาคำตอบเรียกว่า Toolbox โดยโปรแกรม MATLAB จะมี toolbox ในแต่ละสาขา เช่น การประมวลผลสัญญาณ (Signal processing toolbox) การประมวลผลภาพ (image processing toolbox) ระบบควบคุม (control system toolbox) โครงข่ายประสาท (neural networks toolbox) ฟัซซี่ลอจิก (fuzzy logic toolbox) เวฟเลท (wavelet toolbox) การติดต่อสื่อสาร (communication toolbox) สถิติ (Statistics toolbox) และสาขาอื่นๆ มากมาย ภายใน toolbox แต่ละสาขาก็จะมีฟังก์ชันต่างๆ ที่เกี่ยวข้องกับการแก้ปัญหาในสาขานั้นๆ ให้เลือกประยุกต์ใช้งานเป็นจำนวนมาก
โปรแกรม MATLAB ดีอย่างไร
สำหรับผู้ที่ยังไม่เคยใช้งานโปรแกรม MATLAB อาจสงสัยว่าโปรแกรม MATLAB มีข้อดีอย่างไร ทำไมถึงไม่ใช้งานภาษาโปรแกรมอื่นๆ และแตกต่างจากโปรแกรมภาษาอื่นๆ อย่างไร ดังนั้นในหัวข้อนี้จึงได้จำแนกลักษณะเด่นที่ง่ายต่อการใช้งานของโปรแกรม MATLAB ดังนี้ คือ
โครงสร้างของ MATLAB
โครงสร้างของโปรแกรม MATLAB ประกอบด้วย 5 ส่วนใหญ่ คือ
- ภาษาโปรแกรม MATLAB (The MATLAB language)
MATLAB เป็นโปรแกรมภาษาชั้นสูงที่ใช้ควบคุม flow statement ฟังก์ชัน โครงสร้างข้อมูลอินพุท/เอาท์พุท และลักษณะโปรแกรม Object-Oriented Programming ทำให้การเขียนโปรแกรมไม่ยุ่งยากเมื่อเทียบกับการเขียนโปรแกรมด้วยภาษาอื่นๆ เช่น C, Fortran, Basic เป็นต้น - สถาปัตยกรรมในการทำงานของ MATLAB (The MATLAB working environment)
MATLAB จะมีกลุ่มของเครื่องมือที่เป็นประโยชน์สำหรับการทำงานของผู้ใช้โปรแกรม หรือโปรแกรมเมอร์ประโยชน์ที่กล่าวนี้ก็คือการจัดการตัวแปรใน workspace การนำข้อมูลหรือการผ่านค่าตัวแปรเข้า/ออกและกลุ่มของเครื่องมือต่างๆ นี้ก็จะใช้สำหรับพัฒนา จัดการ ตรวจสอบความผิดพลาดของโปรแกรม (debugging) ที่ได้เขียนขึ้น - ฟังก์ชันในการคำนวณทางคณิตศาสตร์ (The MATLAB mathematical function library)
MATLAB จะมีไลบรารีทั่วไปที่ใช้ในการคำนวณอย่างกว้าง เช่น sine, cosine และพีชคณิตเชิงซ้อนโดยสามารถนำไปประยุกต์ใช้เป็นฟังก์ชันหรือไลบรารีเพิ่มเติมขึ้นจากไลบรารีที่ใช้กันโดยทั่วไป เช่น ฟังก์ชันในการหา eigenvalues และ eigenvectors การแยกตัวประกอบและส่วนประกอบของเมตริกซ์ด้วยวิธีต่างๆ การวิเคราะห์ข้อมูล การหาความน่าจะเป็น และการแก้ปัญหาระบบของสมการเชิงเส้นที่เป็นพื้นฐานของสาขาวิชาต่างๆ เป็นต้น ทำให้โปรแกรม MATLAB มีฟังก์ชันสำหรับใช้งานค่อนข้างมากและครอบคลุมในรายละเอียดของการคำนวณสาขาต่างๆ ได้มากขึ้น - Handle Graphics
ระบบกราฟิกของ MATLAB จะประกอบด้วยคำสั่งชั้นสูงสำหรับการพล็อตกราฟโดยมีพื้นฐานอยู่บนแนวความคิดที่ว่าทุกๆ สิ่งบนหน้าต่างรูปภาพของโปรแกรม MATLAB จะเป็นวัตถุ (Object) ซึ่งมีเอกลักษณ์เฉพาะตัว Handle Graphics ประกอบด้วยคำสั่งชั้นสูงให้คุณได้เลือกใช้ในการสร้าง Graphic User Interface บนพื้นฐานการประยุกต์ใช้งานของคุณ นอกจากนี้โปรแกรม MATLAB ยังมีฟังก์ชันที่ใช้สำหรับการแสดงภาพสองมิติ ภาพสามมิติ และการสร้างภาพเคลื่อนไหว - The MATLAB Application Program Interface (API)
API จะใช้เพื่อสนับสนุนการติดต่อจากภายนอกโดยใช้โปรแกรมที่เป็น mex ไฟล์ซึ่งเป็นไฟล์ซึ่งเป็นไฟล์ที่เขียนขึ้นโดยใช้ mex ฟังก์ชันใน MATLAB ซึ่งจะเรียกใช้รูทีนจากโปรแกรมภาษา C และ Fortran หรืออาจกล่าวได้ว่า API เป็นไลบรารีที่เขียนด้วยโปรแกรมภาษา C และ Fortran ที่มีการเชื่อมต่อกับโปรแกรม MATLAB ด้วยไฟล์ที่เป็น mex ฟังก์ชันอีกทั้ง MATLAB API นี้ยังมีความสามารถสำหรับการเรียก routine จาก MATLAB (dynamic linking) ก็ได้
นอกจากลักษณะเด่นของโปรแกรม MATLAB ทั้ง 5 ข้อที่ได้กล่าวมาข้างต้นแล้วโปรแกรม MATLAB ยังมีเครื่องมือที่ใช้สำหรับการวิเคราะห์และทดสอบระบบโดยการจำลองขึ้นมาซึ่งก็คือ Simulink
Simulink เป็นโปรแกรมที่ควบคู่กับ MATLAB ซึ่งเป็นระบบ Interactive สำหรับการจำลองและวิเคราะห์ระบบไดนามิกต่างๆ ที่เป็นระบบเชิงเส้น (Linear) ระบบไม่เชิงเส้น (nonlinear) Simulink เป็นโปรแกรม mouse-driver ที่ให้คุณใช้ระบบโมเดลโดยการวาดบล็อกไดละแกรมบนจอภาพด้วยการใช้เมาส์ทำให้โปรแกรม MATLAB สามารถทำการจำลองระบบได้หลายรูปแบบ น เชิงเส้น (linear) ไม่เชิงเส้น (nonlinear) เวลาต่อเนื่อง (continuous-times) เวลาไม่ต่อเนื่อง (discrete-time) และระบบเหลายอัตรา (multirate) ซึ่งแต่ละรูปแบบที่นำมาสร้างแบบจำลองในการวิเคราะห์นี้ผู้ใช้จะต้องมีความเข้าใจพื้นฐานการทำงานของบล็อกแต่ละบล็อกได้เป็นอย่างดี ตลอดจนเข้าใจระบบโดยรวมของงานที่จะกระทำด้วย
Blocksets เป็นสิ่งที่เพิ่มเติมใน Simulink โดยจะเป็นไลบรารีของบล็อกสำหรับการประยุกต์เฉพาะ เช่น การติดต่อสื่อสาร (Communications) การประมวลผลข้อมูล (Signal processing) และระบบไฟฟ้ากำลัง (power systems)
Real-time Workshop เป็นโปรแกรมที่ให้คุณสร้าง c code จากบ็อกไดอะแกรมของคุณและสามารถกระทำกับบล็อกไดอะแกรมได้หลากหลายด้วยระบบเวลาจริง (real-time systems)
โปรแกรม MATLAB มีอยู่หลาย version ซึ่ง version ดั้งเดิมของโปรแกรม MATLAB จะใช้งานบน DOS ที่มีการคำนวณไม่ยุ่งยากเหมาะสำหรับผู้เริ่มศึกษา คอมพิวเตอร์ที่ใช้ก็ไม่จำเป็นต้องมีพื้นที่หน่วยความจำมาก ใช้ได้กับ CPU ที่มีความเร็วต่ำ แต่มีข้อเสียคือฟังก์ชันที่นำมาใช้งานมีน้อยทำให้เขียนโปรแกรมที่มีความซับซ้อนได้ไม่ดีเท่าที่ควรเพราะมีประสิทธิภาพและความเร็วในการประมวลผลต่ำ ต่อมาเมื่อระบบเลือกใช้ได้มากมายจึงทำให้โปรแกรม MATLAB มีประสิทธิภาพและมีความสามารถในการประมวลผลที่เร็วขึ้น version ใหม่ที่ได้ทำการปรับปรุงใหม่ให้ดีขึ้นนี้จะใช้งานบน Windows ทำให้ผู้ใช้มีความสะดวกในการใช้งานมากขึ้น ข้อดีของ version ใหม่นี้คือมีประสิทธิภาพที่ดีขึ้น การประมวลผลโปรแกรมที่ซับซ้อนมีความเร็วสูงขึ้น และมีฟังก์ชันต่างๆ ให้เลือกใช้ในการสาขาต่างๆ มากมาย แต่ก็ต้องใช้กับคอมพิวเตอร์ที่มีพื้นที่หน่วยความจำมาก CPU มีความเร็วสูง และต้องการ Co-processor ในการช่วยคำนวณแต่เมื่อเปรียบเทียบกับผลดีที่ได้ก็ถือว่าคุ้ม
คอมพิวเตอร์ที่เหมาะสมสำหรับโปรแกรม MATLAB
เนื่องจากโปรแกรม MATLAB เป็นโปรแกรมที่ใช้สำหรับการคำนวณทางคณิตศาสตร์และกราฟิกที่ซับซ้อนดังนั้นจึงจำเป็นต้องใช้เครื่องคอมพิวเตอร์ที่มีความเร็วสูง คอมพิวเตอร์พีซีที่เหมาะสมกับโปรแกรม MATLAB คือ มีซีพียูรุ่นเพนเทืยมขึ้นไป แรมควรมีอย่างต่ำ 32 เมกกะไบต์ ส่วนฮาร์ดดิสก์ควรมีเนื้อที่ว่างเกินกว่า 80 เมกกะไบต์ขึ้นไป
คำสั่งโปรแกรม MATLAB รูปแบบการแสดงค่า ตัวอย่างค่า Pi
format short การแสดงตัวเลข 5 ตำแหน่ง 3.1416
format short e การแสดงตัวเลข 5 ตำแหน่งพร้อมเลข Exp 3.1416e+00
format short g การแสดงตัวเลขที่ดีที่สุดระหว่างในรูปแบบสั้นๆ หรือในรูปแบบเลข Exp แล้วแต่ความเหมาะสม 3.1416
format long การแสดงตัวเลข 16 ตำแหน่ง 3.14159265358979
format long e การแสดงตัวเลข 16 ตำแหน่งพร้อมเลข Exp 3.14159265358979e+00
format long g การแสดงตัวเลขแบบยาว 3.14159265358979
format hex การแสดงตัวเลขแบบฐาน 16 คือ 1..9 และ A..F 400921fb54442d18
format bank การแสดงตัวเลขแบบธนาคาร คือทศนิยม 2 ตำแหน่ง 3.14
format + การแสดงค่าตัวเลขว่าเป็น บวก ลบ หรือ ศูนย์ +
format rat การแสดงอัตราส่วนโดยประมาณ 355/113
| ลักษณะการดำเนินการ | ตัวดำเนินการ | รูปแบบทางคณิตศาสตร์ | รูปแบบทาง MATLAB |
| การบวก การลบ การคูณ การคูณเชิงสมาชิก การหารทางขวา การหารทางซ้าย การหารเชิงสมาชิก การยกกำลัง การยกกำลังเชิงสมาชิก | + - * .* / \ ./ Ab A.b | a+b a-b axb - a/b b/a - ab - | a+b a-b a*b a.*b a/b a\b a./b a^b a.^b |
ในทาง MATLAB คือการนำเอา Matrix a และ Matrix bมา Operate กัน เช่น + ,-,*,/,หรือยกกำลังกัน เพราะฉะนั้นเงื่อนไขการ Operate ต่างๆ จึงเป็นวิธีการทาง Matrix ส่วนเครื่องหมายที่มีจุด (.) แสดงว่าจะกระทำเฉพาะแถวกับหลักเดียวกัน เช่น
a = 1 2 3
4 5 6
b = 2 2 2
2 2 2
a.^b = 1 4 9
16 25 36
ตัวดำเนินการเปรียบเทียบและตรรกะ ลักษณะดำเนินการ ตัวดำเนินการเปรียบเทียบและตรรกะ ตัวอย่าง
| ลักษณะดำเนินการ | ตัวดำเนินการเปรียบเทียบและตรรกะ | ตัวอย่าง |
| น้อยกว่า น้อยกว่าหรือเท่ากับ มากกว่า มากกว่าหรือเท่ากับ เท่ากับ ไม่เท่ากับ และ หรือ ไม่ | < <= > >= == ~= & | ~ | x<10 x<=10 x>10 x>=10 x==1 x~=5 x>2 & y<1 x>2 | y<1 ~x |
ฟังก์ชั่นที่ใช้ในการหาค่าทางตรีโกณมิติ
| คำสั่ง | รายละเอียด |
| sin(x) sinh(x) asin(x) asinh(x) | ใช้คำนวณหาค่า Sine ของ x ใช้คำนวณหาค่า Hyperbolic sine.ของ x ใช้คำนวณหาค่า Inverse sine. ของ x ใช้คำนวณหาค่า Inverse hyperbolic sine. ของ x |
| cos(x) cosh(x) acos(x) acosh(x) | ใช้คำนวณหาค่า cos ของ x ใช้คำนวณหาค่า Hyperbolic cos.ของ x ใช้คำนวณหาค่า Inverse cos ของ x ใช้คำนวณหาค่า Inverse hyperbolic cos. ของ x |
| tan(x) tanh(x) atan(x) atan2(x) atanh(x) | ใช้คำนวณหาค่า Tangent ของ x ใช้คำนวณหาค่า Hyperbolic Tangent.ของ x ใช้คำนวณหาค่า Inverse Tangent. ของ x ใช้คำนวณหาค่าFour quadrant inverse tangent ของ x ใช้คำนวณหาค่า Inverse hyperbolic Tangent ของ x |
| sec(x) sech(x) asec(x) asech (x) | ใช้คำนวณหาค่า Secant. ของ x ใช้คำนวณหาค่า Hyperbolic Secant.ของ x ใช้คำนวณหาค่า Inverse Secant. ของ x ใช้คำนวณหาค่า Inverse hyperbolic Secant. ของ x |
| csc(x) csch(x) acsc(x) acsch(x) | ใช้คำนวณหาค่า Cosecant ของ x ใช้คำนวณหาค่า Hyperbolic Cosecant.ของ x ใช้คำนวณหาค่า Inverse Cosecant. ของ x ใช้คำนวณหาค่า Inverse hyperbolic Cosecant ของ x |
| cot(x) coth(x) acot (x) acoth(x) | ใช้คำนวณหาค่า Cotangent ของ x ใช้คำนวณหาค่า Hyperbolic Cotangent.ของ x ใช้คำนวณหาค่า Inverse Cotangent. ของ x ใช้คำนวณหาค่า Inverse hyperbolic Cotangent ของ x |
ฟังก์ชั่นที่ใช้ในการหาค่า Exponential.
| คำสั่ง | รายละเอียด |
| exp(x) log(x) log10(x) log2(x) pow2(x) nextpow2(x) | ใช้คำนวณหาค่า Exponential. ของ x ใช้คำนวณหาค่า Natural logarithm.ของ x ใช้คำนวณหาค่า Common (base 10) logarithm. ของ x ใช้คำนวณหาค่า Base 2 logarithm and dissect floating point number. ของ x ใช้คำนวณหาค่า เลขยกกำลังที่มี 2 เป็นฐาน ของ x ใช้คำนวณหาค่า ตัวเลขยกกำลังที่มี 2 เป็นฐานที่มีค่าเท่ากับหรือมากกว่า ของ x |
| abs(x) ceil(x) floor(x) round(x) sqrt (x) rem(x,y) sign(x) | ใช้คำนวณหาค่า Absolute ของ x ใช้คำนวณหาค่าจำนวนเต็มใดๆที่ใกล้เคียงกับค่าของ x โดยให้ค่านั้นเข้าใกล้ ? มากที่สุด ใช้คำนวณหาค่าจำนวนเต็มใดๆที่ใกล้เคียงกับค่าของ x โดยให้ค่านั้นเข้าใกล้-? มากที่สุด ใช้คำนวณหาค่าจำนวนเต็มใดๆที่ใกล้เคียงกับค่าของ x โดยถ้าป็นทศนิยมเกิน 0.5 ปัดขึ้น ใช้คำนวณหาค่า Square root. ของ x ใช้คำนวณหาค่าเศษที่เหลือจากการหารกันระหว่าง x และ y ใช้สำหรับกำหนดค่าของ x ใดๆ ให้มีค่าเป็น -1,0,1 ถ้าเป็น -1 แสดงว่าค่าของ x > 0 ถ้าเป็น 0 แสดงว่าค่าของ x = 0 ถ้าเป็น 1 แสดงว่าค่าของ x < 0 |




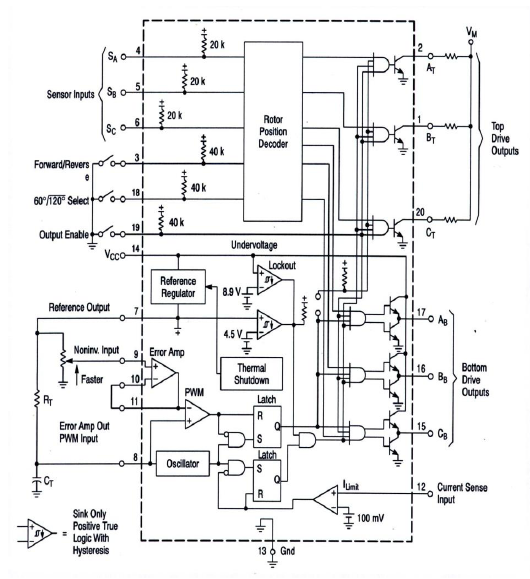
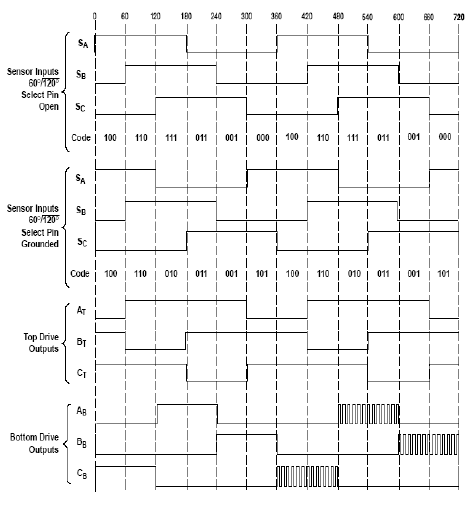
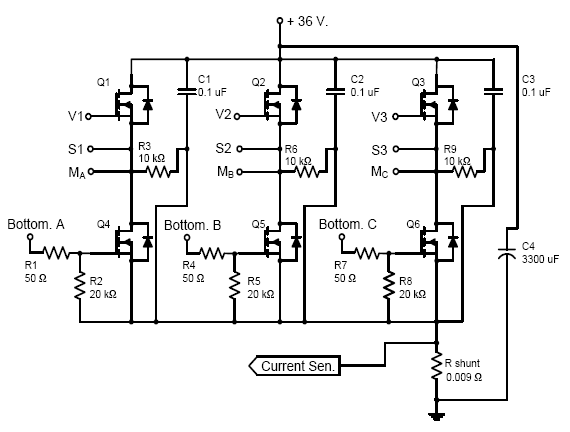
 รูปอีซีมอเตอร์
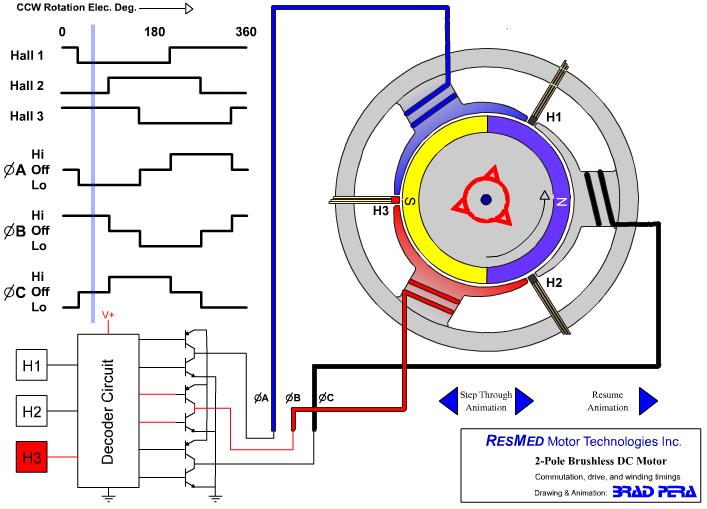
รูปอีซีมอเตอร์